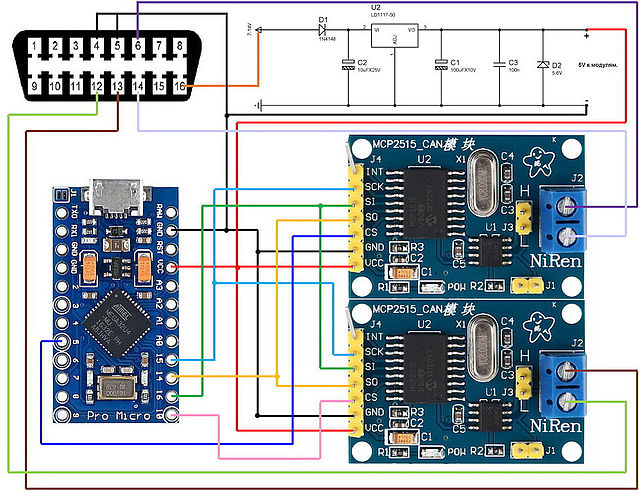
-Arduino atmega 168 o 328p -2x transceiver canbus tja1050 mcp2515 -conector obd2 macho para conectar al coche -placa dc-dc para reducir de los mas de 14v que da el coche a entre 5-12v que soporta el arduino.
El esquema de conexión es el siguiente. La parte del esquema de alimentacion se puede sustituir por un DC-DC que venden baratos en aliexpress o ebay, se alimenta la entrada con 16 (14v) y 4-5 (masa) y la salida se conecta a raw y gnd en el arduino.
Luego toca programar el arduino, instalando el arduino ide, copiando las librerias a la carpeta documentos\arduino\librerias, compilando el codigo y subiendolo al arduino.
CODIGO VERSION 2: Temperatura motor 10s y temperatura exterior 2s de forma ciclica como se ve en el video.
TIME_MOT 10000UL -> 10 seg TIME_EXT 2000UL -> 2 seg
1 seg = 1000UL. Modificar como se desee.
#include <mcp_can.h> #include <spi.h> #define TIME_MOT 10000UL #define TIME_EXT 2000UL #define DELAY_DATA 10UL #define DELAY_DATA2 20UL long unsigned int rxId; unsigned long timeData = 0; unsigned long delayData = 0; unsigned long delayData2 = 0; unsigned int data = 0x0; unsigned int newData= 0x0; unsigned int engTemp = 0x0; unsigned int extTemp= 0x0; bool refreshData = false; bool refreshData2 = true; byte flag = 1; unsigned int temp = 0x0; unsigned char len = 0; unsigned char rxBuf[8]; unsigned char stmp[8] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00}; MCP_CAN CAN1(5); MCP_CAN CAN2(10);